搜索
关闭




激光轮廓传感器
发布时间:2023-02-20
►激光轮廓传感器
原理与方法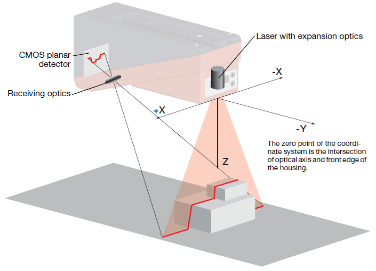
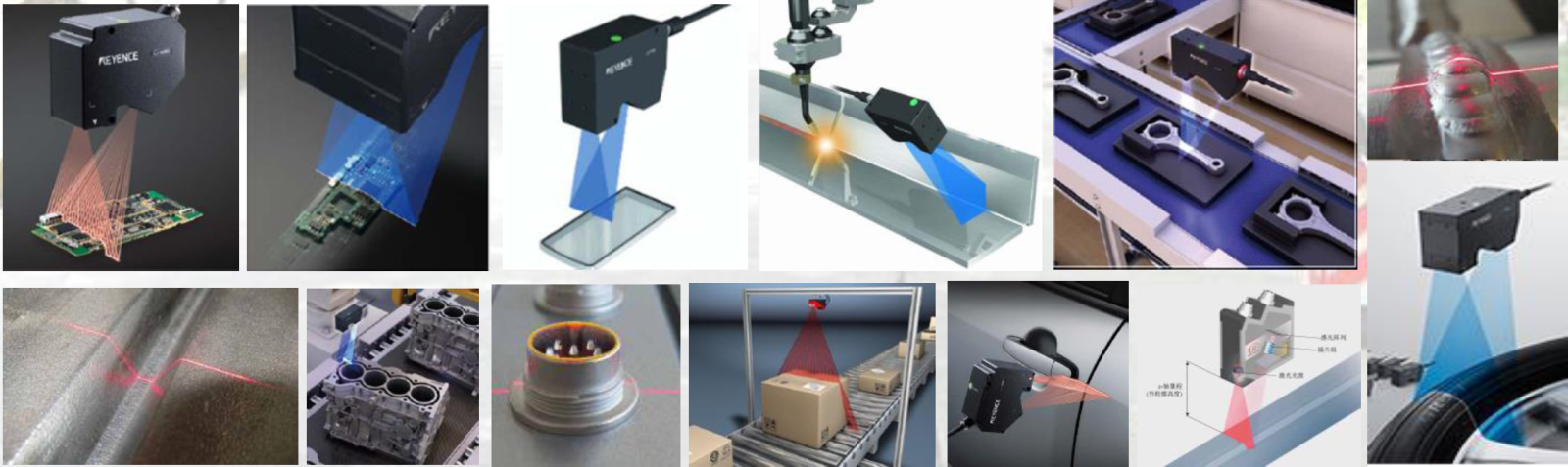
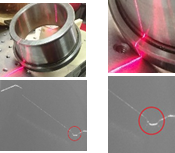
激光轮廓传感器是基于激光三角测距(Laser Triangulation)原理实现目标二维轮廓的非接触高精度测量。由激光二极管发出的线激光经过发射镜组聚焦和准直后照射到被测目标上并在表面形成一条轮廓线,该轮廓线经过成像镜组后在面阵光电接收器(CCD/CMOS等)上成像,通过数据处理可以直接得到被测目标的二维轮廓。如果在垂直方向移动传感器或被测哦目标,则可以实现被测目标三维形状的非接触高精度测量,亦称激光扫描传感器。
特点特色
非接触测量:无测量力,无磨损;

绝对测量:可遮光中断,断电记忆;
适应面广:可测不同材质、颜色、软硬、明暗、冷热的目标;
功能强大:可测高度、宽度、位置、角度、轮廓等多种参数;
测量精度高:可实现全量程非线性达±0.05%FS ;
响应快速:滞后小,适于动态测试、实时控制;
原创技术
照度分布模型:解决传统几何光学模型的问题;
理想光斑定位算法:可溯源几何模型的波形定位算法;
不同表明自应适分类控制算法:可测不同表面目标;
动态测量激光控制算法:可以满足动态测量要求的高速算法;
高精度非线性校准算法:可实现全量程高精度非线性校准;
典型应用