搜索
关闭




视觉传感器
发布时间:2023-02-20
原理与方法
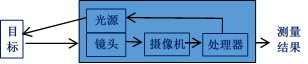
利用光源、镜头和摄像机获取被测对象的图像,通过处理器进行图像与数据处理获取被测对象的特征量,由标准接口输出测量结果(非图像)。
特点特色
集成度高、体积小、使用方便;
直接输出测量结果(非图像);
可灵活设定功能。


原创技术
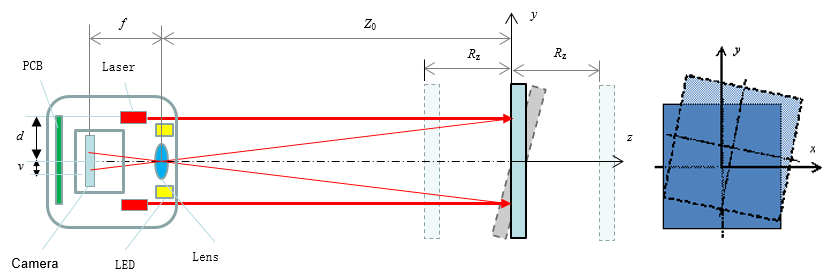
基于激光测距的6自由度三维位姿传感器:
典型应用
6自由度 - 横向、纵向、距离、偏航、俯仰、滚转;
机器人末端识别目标三维位姿,用于抓取目标;
