搜索
关闭




三维视觉检测
发布时间:2023-02-21
原理与方法
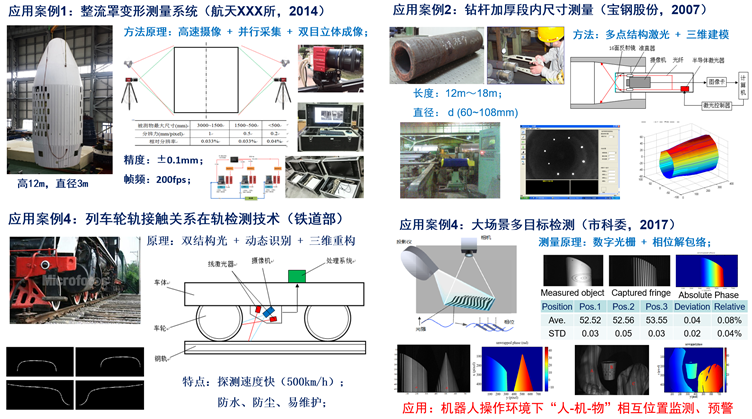
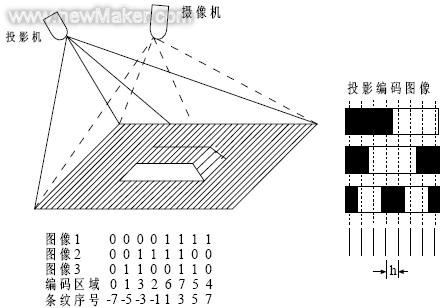
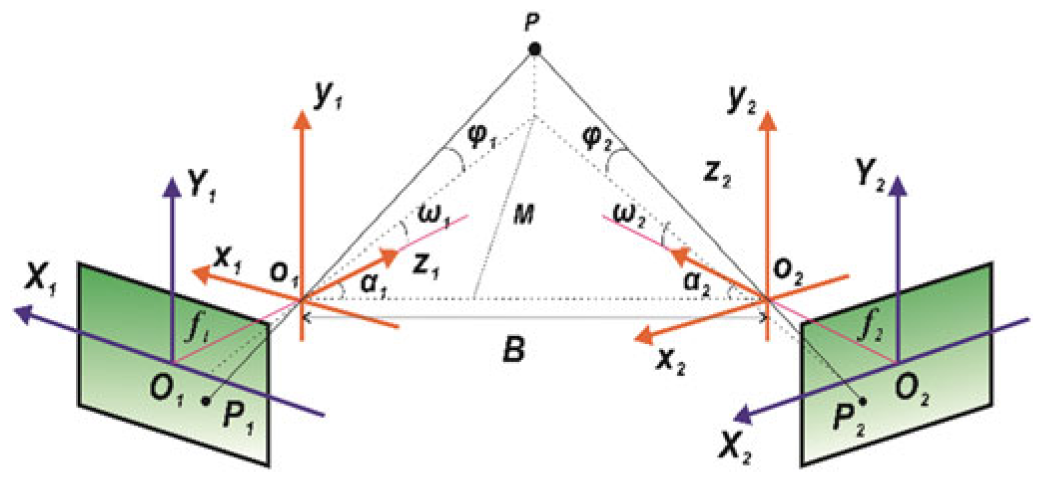
采用基于结构光的双目立体视觉方法,实现大范围场景下目标的三维测量与三维位姿定位。
特点特色
大量程:400mm×300mm×200mm ~ 10m×10m×10m;
高精度:三维位置重复精度±0.05mm,三维姿态重复精度±0.05°;
原创技术
无约束模型:去除相机、投影与基准平面无约束模型,大幅度增强适应性;
单幅正弦波调制光栅:显著提高测量速度并降低环境光干扰;
将数字光栅投影与双目立体视觉有机融合:成倍提高精度、避免产生遮挡;
典型应用